

ロボット業界は、従来の産業ロボットに加え協働ロボットの参入が進んでいる。しかし、いずれの ロボットも固定して使用されているため費用対効果を出しづらく、ロボットの導入を躊躇する 企業が多い。 その課題を解決するために弊社はロボット業界に参入した。
はじめに
株式会社日立プラントメカニクスは、自律型移動ロボット「HiMoveRO(ハイモベロ)」(図1)を2017年4月から正式販売を開始した。通常は協働ロボットを定位置に固定して使用しているが、HiMoveROに協働ロボットを搭載することで複数の場所に自律移動し、複数の作業を行えるようにした。

図1 HiMoveRO
HiMoveROの開発経緯
近年、ロボット会社各社から産業ロボットに変わる協働ロボットが発表されている。その協働ロボットをAGVに搭載し移動させる装置を開発してはどうかという話があった。
しかし、どのような業界にニーズがあるのか? 市場規模はどのくらいあるのか? どのような機能が必要なのか?どこにヒヤリングすればよいのか? などなどわからないことばかりであった。
それでも2015年10月から市場調査を開始し、JPCA 展、インターフェックス展などの展示会でニーズを調査し、またロボットを使用している系列会社に見学に行き使用状況を調査した。さらに日本ロボット学会、ロボット革命イニシアティブ協議会を訪問しヒヤリングするなどを行なった。
その調査の結果、一定のニーズがあることがわかり、2016年4月に開発申請をし、約半年かけて試作機を完成させた。そして2016年10月に製品発表および営業活動を開始したものが「HiMoveRO」である。
HiMoveROの技術的特長
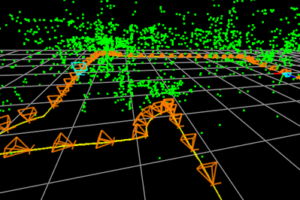
HiMoveROの上に協働ロボットを搭載することにより、協働ロボットを固定ではなく、複数の場所で使えるようになる。つまり協働ロボットが複数の場所に自律移動し、複数の作業を行うことができる。今回、カワダロボティクス殿の技術的協力を得て、協働ロボットNEXTAGEを搭載することにした。また自律移動には、自己位置推定と環境地図作成を同時に行うSLAM技術を採用している。
自己位置推定と環境地図作成には、レーザー距離センサを搭載し実現した。そのため、床面に反射テープ、磁気テープ、マーカなどを敷設する必要がなく、作業場所変更に柔軟な対応が可能になった。停止精度はSLAM技術、NEXTAGEの画像技術、オドメトリ技術を合わせることにより、±10mm以内を実現した。
バッテリは鉛バッテリとリチウムバッテリに加え、リチウムバッテリと非接触式自動充電方式もオプションに加えた。そのほかには、オプションハンド、ロボット揺れ防止機能としてアウトリガも準備している。表1に主な仕様を示す。
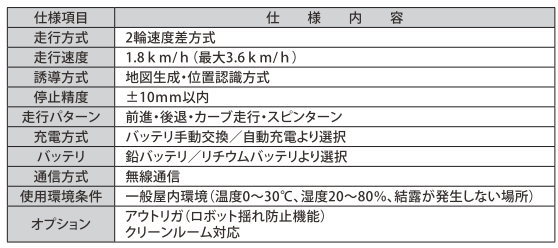
表1 HiMoveRO 仕様
HiMoveROの主な部品は、レーザー距離センサ、モータ、バッテリ、コントローラ、コンピュータ、障害物センサ、LEDから構成されている。 さらに、カワダロボティクス殿の技術協力のもとプラグインソフトウェアを作成し、とHiMoveRO間でデータ送受信を可能にした。このデータ送受信により、作業場所への到着をHiMoveROからNEXTAGEに送信し、作業の完了をNEXTAGEからHiMoveROに送信する仕組みができた。
ニーズとターゲット顧客
ニーズとしては、どの業界においても労働人口の減少、働き方改革、生産性の向上、品質の向上という目的を達成するために以下のことが考えられる。
➀過酷労働(単純、危険)の代替え
➁ヒューマンエラーの撲滅(品質の向上)
➂24時間稼働
➃労働力の確保
➄IoTプラットフォーム連携(データ連携)
そして、具体的なターゲット顧客としては以下を考えている。
➀半導体製造関係
➁電子部品製造関係
➂医薬開発・研究所関係
➃医療検体検査関係
医薬開発・研究所では、ピペットを扱う分注作業(図2)のことを「ピペット地獄」と呼んでおり、この分野でのニーズは高いと感じている。また物流関係のピッキングでの相談を多く受けるが、把持する物品の形状が異なる、重さが異なる、硬さが異なるなどで技術的には難しい。ピッキング技術はコンテストが開催されているレベルであるため、物流の現場にロボットが採用されるまでは数年がかかると予測している。

図2 医薬向け分注作業
ロボット市場動向と弊社の対応
各ロボット会社からは、今まで以上に協働ロボットが販売されることが見込まれる。さらに、今まで自動化、およびロボット化が進んでいなかった分野、作業に協働ロボットが活用されることが予測される。
技術的には、画像処理技術が進歩したことによりバラ物ピッキングが可能になり、定位置になくても物を掴めたり、置くことができるようになってきた。さらに画像処理技術が進めば、ロボットのティーチングも容易にできるようになる。
つまり、ロボットが人間の作業を見るだけで作業を覚え、人間と同じ動きをすることが可能になると思われる。そして、AI技術、およびディープラーニング技術も進歩し、一度覚えたティーチングをベースに作業を繰り返すことによって新しい動作、機能を学習していくようになる。
AI技術がさらに進歩すれば、決められた作業以外の作業を考えるロボット、通常とは異なる作業をするロボットが登場するのも遠い日ではないかもしれない。ただし、協働ロボットおよび自律型移動ロボットに関しては、リスクアセスメントの課題が残っている。
協働ロボット、80W規制をクリアしているからといって安全とは言い切れない。どんなに弱いパワーでゆっくり動作したとしても、ハンドに鋭利な物が装着されていれば当然安全は担保されない。協働ロボットを使用する現場では、3ステップメソッドの安全大原則を守る必要がある。また、協働ロボットを安全に扱う際の考え方として、次の2項目を遵守する必要がある。
1) 協働ロボットの動作範囲と作業者の動作範囲がラップしないこと
2) もし協働ロボットが作業者に接触しても安全停止すること
さらに、弊社のHiMoveROのように協働ロボットを自律型移動させる場合(図3)、協働ロボットのリスクアセスメント、AGVのリスクアセスメントを合わせて提案することになる。
しかしながら、明確なルールは決まっていないのが現状である。すでに自律型移動ロボットのニーズは広がっており、弊社としてはリスクアセスメントを含めたロボット業界のルール作りにかかわっていきたい。

図3 HiMoveRO作業風景
IoT 技術との連携について
弊社の親会社である日立製作所では、IoTプラットフォーム「Lumada(ルマーダ)」を2016年5月から提供している。データの統合、分析やシミュレーションから知見を得るソフトウェア技術などで構成されるプラットフォームで、HiMoveROと連携させることも可能だ。図4 に IoT プラットフォーム「Lumada(ルマーダ)」を示す。
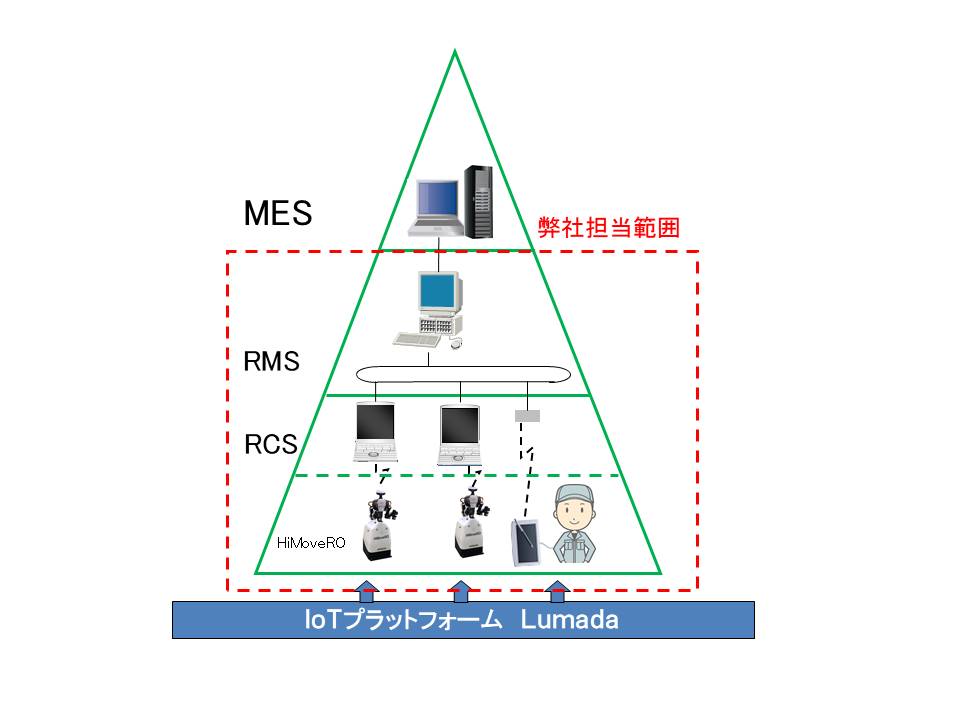
図4 HiMoveRO-Lumada連携
IoTプラットフォームとデータ連携することにより、生産性の向上、品質の管理、歩留まりの原因究明、問題発生時のトレーサビリティ等を行うことができる。
また、日立製作所は製造現場の管理システムなどでも豊富な実績をもっており、こういったソフトウェア技術に、HiMoveROのような自動化・省人化に貢献できるハードウェアを組み合わせることで、日立グループ全体でのソリューション提案力を高めている。
今後の方針
弊社は産業ロボット、協働ロボット製造メーカではないので、自律型移動ロボットHiMoveROの機能をアップすることでお客様の事業に貢献できるようにする。たとえば、より簡単に地図を作成したり、工場や設備レイアウトの変更に合わせて地図を自動変更できるように機能アップしたい。
地図を作成できる広さも拡張し、フロア間をまたがっても自動的に地図を切替え移動できるようにしたいと考えている。さらに、HiMoveROに双腕ロボットだけではなく、片腕ロボットも搭載し、お客様のニーズにお応えする予定である。
おわりに
2017年10月経済産業省から「Connected Industries」が提唱、発信された。これは、様々な業種、企業、人、機械、データがつながって、AI等により新たな付加価値や製品・サービスを創出し、高齢化、人手不足、環境、エネルギー制約などの社会課題を解決しようというものである。弊社のロボット事業は、その5つの重点取組分野である「ものづくり・ロボティクス」を中心に社会貢献をしていく所存である。
■問い合わせ先
株式会社日立プラントメカニクス
TEL:03-5956-1301
E-mail:tetsuya.tahara.wg@hitachi.com
http://www.hitachi-hpm.co.jp/
























コメントを残す