
KUKAは1898年ドイツで創立し、今年で122周年、日本法人は13周年を迎える。ロボット製造を専業とするメーカとして、未来を見据えた新しい技術の開発に重きを置いてきた。
現在日本で、工業のみならずサービス業においてもロボットが注目され始めているが、人と同じ空間で作業をおこなう、いわゆる「協働ロボット」よりも幅広いコンセプトの技術開発をKUKAでは90年代より進め、世に出し、様々な工程で利用いただいている。
本稿では、KUKAの最新技術を搭載したセンシティブロボット「LBR iiwa」と、それを搭載した自律走行型のモバイルロボット「KMR iiwa」について紹介する。
センシティブロボット 「LBR iiwa」
現行のセンシティブロボットLBR iiwaは、シリーズの第五世代である。1990 年代の初頭に始まったドイツ航空宇宙センター(DLR)による、宇宙空間で利用するためのロボットアームの研究開発が起源であり、その後KUKAとの共同研究がすすめられた。第四世代から一般販売が開始され、2011年に東京で開催された国際ロボット展において、日本で初めて紹介された(図1)。
-e1554852747637.jpg)
図1 LWR4+(LBRⅣ)センシティブロボット 四世代目
LBRは、ドイツ語で「軽量ロボット」を意味するLeichtbauroboter(英語でLight Weight Robot)、iiwaは、「知的能力をもった産業用作業アシスタント」を意味するIntelligent Industrial Work Assistantの頭文字から名付けられた。アーム形状は、人と共に作業をおこなう場面を想定し、なめらかな曲面で構成され、各軸が回転しても手を挟まない空間が保たれている。
現行モデルでは、可搬重量は 7 キロ(リーチ800mm)と14キロ(リーチ820mm)の2タイプがある。KUKAの他の産業用ロボットの多くが6軸であるのに対し、LBR iiwaは7軸を有し、各軸すべてに高感度のトルクセンサを搭載しており、これにより力覚制御による繊細な作業が可能である(図2)(表1)。
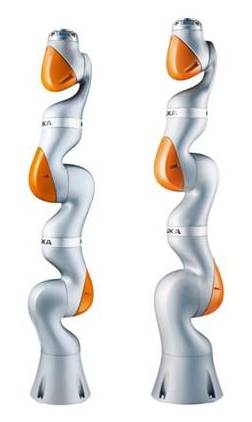
図2 LBR iiwa7 R800(左)とLBR iiwa14 R820(右)、アーム長(リーチ)の差は20mm
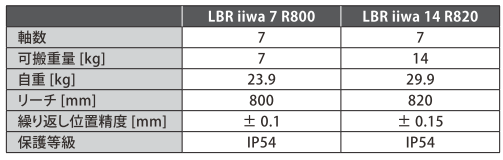
表1
LBR iiwa のコントローラ「KUKA Sunrise Cabinet」に搭載されるオペレーティングシステム「KUKA Sunrise.OS」では、アプリケーション開発用のプログラム言語はロボット専用の言語ではなくJavaを使用する。それにより、自由度の高いアプリケーション開発が可能である。
また、高感度トルクセンサにより、多様な環境に対して柔軟な接触作業も可能になり、インピーダンス制御により人間の腕のようなセンシティブな動きを実現している。LBR iiwaは、EN ISO 13849-1のカテゴリ3およびパフォーマンスレベルdを満たした安全機能を有する。
人の安全を守るために不可欠な安全機能ソフトウェア「KUKA Sunrise.HRC」を標準装備しており、トルクセンサによる衝突検知のみならず、力、トルク、速度、領域監視など、多様な安全機能を備えている。これにより、ロボットと同じ空間にいる人の安全が守られるというだけでなく、人が積極的にロボットに触れ、ともに作業を進めることも可能となる。
1)特徴的機能の例:インピーダンス制御、オシレーション機能
LBR iiwaは、デカルト座標系または関節座標系において、方向ごとに減衰係数とスティフネス(剛性)の両方をパラメータで設定できる。これにより、バネのようにしなやかな動きが可能になり、組み立て工程の際の位置ずれに対しても破損なく相手に触れ、相手に倣ってはめ込むことも可能になる。
同時に、インピーダンス制御の状態で、力やトルクの振動をかけ、「ゆする」動きをつくることができる。これにより、これまでのロボットでは困難と考えられていた組み立てや、嵌合工程の含まれた組立の自動化が可能になる。
【導入事例】 ギアの嵌合
LBR iiwaは設置面の向きを選ばないため、傾斜のある場所への設置や天吊りも可能である。図3の例は、LBR iiwa が天吊りで設置され、ギアの歯がかみ合う感触を確かめながら、嵌合を進めるという、LBR iiwaの能力を活かした工程の1例である。
重いワークであるギアを搬送し嵌め合わせる工程はLBR iiwaがおこない、負担の軽いワークのはめ込みは作業員がおこなう。仕上がりの確認は作業員が目視でおこなう。もちろん、作業員がロボットに接触した際には、LBR iiwaは動作を停止する。

図3
【導入事例】 スクリューイング
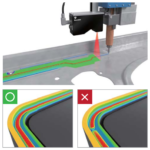
射出成型のパーツのネジ穴の位置に誤差があった場合でも、オシレーション機能により探し当て適切にスクリューイングをおこなう。インピーダンス制御により、穴に引っかからないようにねじ山に追従してスクリューイングを進めることができる(図4)。

図4
2)特徴的機能の例:グラビティーコンペンセーション(重力補償)
LBR iiwaは、自重やツールの重量を補償して、無重力のように制御し、ごく僅かな外力により動かすことができる。これにより、重いツールをつけた状態でも楽に手で動かし、直接教示することができる(図5)。
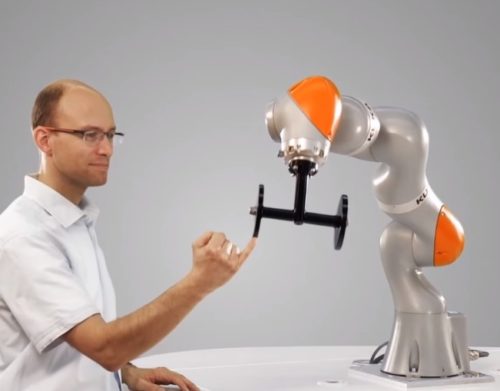
図5
モバイルロボット「KMR iiwa」
2018年に正式にリリースをした自律走行型のモバイルロボット「KMR iiwa」は、200キロ可搬の自律走行台車「KMP200」に、センシティブロボット「LBR iiwa」を搭載した未来型の製品である。足元にレーザスキャナを備え、周囲を確認しながら自由自在に走行をする。これからのスマートファクトリーの中での、繰り返し行き来をする作業や、ロボットが稼働する工程と工程の間をつなぐ役目が期待される(図6)(表2)。

図6
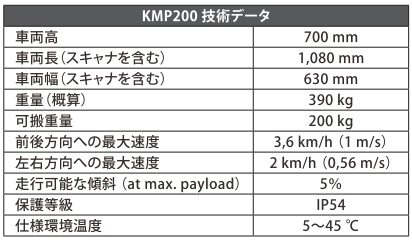
表2
特殊な構造のオムニホイールを利用し、前後左右斜め方向への直進や、その場での回転など、自由自在に走行する。それにより、現場のレイアウトにも柔軟に適応でき、走行のために余計なスペースを減らすことができる(図7、8)。

図7
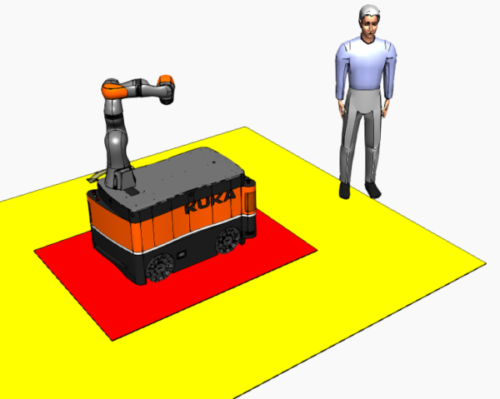
図8 衝突を予防するための検知機能
赤:保護領域/黄:警告領域
走行中に注意エリア(黄)に想定外のものを検知すると、障害物と認識し走行速度を落とす。安全エリア(赤)に入ると停止する。標準仕様の初期設定では、それぞれのエリアの広さは、走行速度により3段階に分けている。
従来必要であった誘導線などを必要とせず、レーザーセンサを駆使した自律走行機能を有し、走行管理システム「KUKA.Navigation Solution」により工場全体で複数の、異なる種類のモバイルロボットの制御も可能となる。
KMR iiwaの場合、KMP 200とLBRiiwaは同じ開発環境でアプリケーションの開発ができる。モバイルロボットの機動性を活かして、多様な生産現場に人の代わりとして柔軟に導入し、人の手でなければ取り扱いの難しかった繊細な工程への導入も可能になる。KMR iiwaのラインナップにはクリーンルーム仕様「KMR iiwa CR」もあり、導入の可能性をさらに広げている。
1)KMR iiwa CRのクリーン度
Clean Room Class(ISO 14644-1)
高さ~床上10cm Class 4
床上10cm~ Class 3
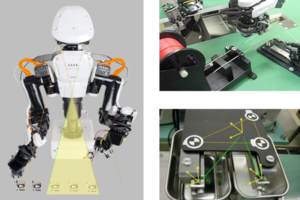
【導入事例】 FOUPの搬送
人で行うFOUPの繰り返しの搬送をKMR iiwaで行うことで、人的ミスの防止や省人化が実現できる。また、クリーンルームの衛生管理の負担も軽減される(図9)。
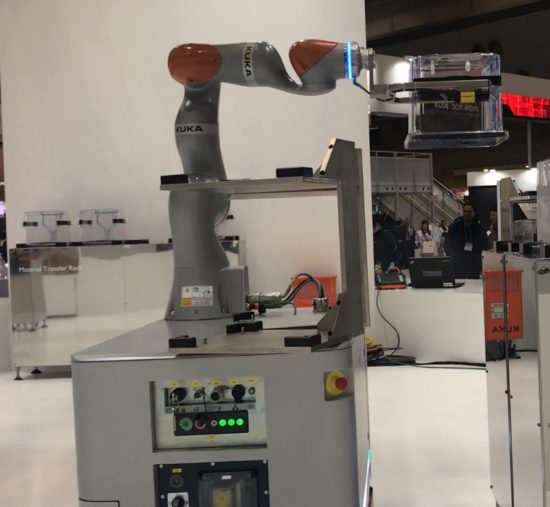
図9
今後の取り組み
KUKAでは、ビッグデータとAIの開発も並行しておこなっている。遠隔から生産ラインの機器の稼働データを収集、蓄積、解析をするためのクラウド環境をスタートしている。今後、ここにさらに人とともに、また人の代わりに作業ができるLBR iiwa、そして自由自在に走行をするKMR iiwaの導入が進み、統合される仕組みが出来上がれば、より発展的な生産性向上への貢献が期待できる。
■問い合わせ先
KUKA Japan 株式会社
TEL:045-744-7531
E-mail:JP-Marketing@kuka.com
URL:https://www.kuka.com/























コメントを残す