
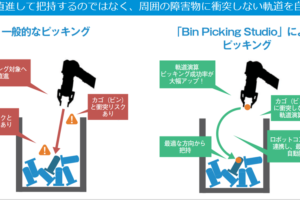
生産現場で単純作業の自動化が進むにつれ、複雑で感覚的な作業や多品種少量生産等、自動化が難しい作業の扱いが課題となる。当社は、ロボットの自律性と作業性の向上、人とロボットの協働、という異なる2つの解決策を提案している。本稿では、当社の代表的な製品の特長や適用事例を中心に紹介する。
はじめに
市場のグローバル化が加速する中、世界の労働市場では人手不足が深刻化しており、先進国・途上国とも従来のように労働力を確保することが難しくなってきている。
このような背景から、工場等の生産現場では、さらなる自動化への期待が高まっている。しかし、ロボットをはじめとする自動化機械は、教示された動作を正確に繰返すことは得意だが、状況に合せて判断する能力は未だ人間に及ばない。
このため、単純作業の自動化が進むほど、複雑で感覚的な作業や多品種少量生産等、自動化が難しい作業をどのように扱うかが課題となってくる。これらの課題に対し、当社のロボットは2つのアプローチから解決策を用意している。
1つはセンシングによるロボットの自律性と作業性の向上、もう1つは人との協働が可能なロボットの提案である。以下に、代表的な製品を紹介する。
MOTMAN-MPPシリーズ
軽量ながら大量生産される食品・薬品・化粧品の生産工程では、ハンドリングロボットによる自動化が進んでいる。特にピッキング工程では、高速動作、搬送中の異物混入予防(安全性、清潔性)が求められる一方、多品種・短ライフサイクルゆえの生産工程での頻繁な品種変更への対応も重要となる。
当社はこれらの要求に応え、高速ハンドリング(ピッキング)ロボットMOTOMAN-MPP3H(以下、MPP3Hと略す)およびMOTOMAN-MPP3S(以下、MPP3Sと略す)、ロボットコントローラFS100および高速ピッキング用アプリケーションソフトウェアMotoPickを提供している。
1)高速ピッキングロボットMPP3H、MPP3S
MPP3HとMPP3Sは、パラレルリンク構造を採用し、根元に駆動部を配置して可動部の質量を小さくすることにより、高速な連続動作を実現したロボットである。図1にその動作範囲を示す。ロボット単体動作(アデプトパターン)で、搭載質量1kg時に0.25s、3kg時に0.4sのサイクルタイムを実現している。
また、手首軸許容慣性モーメント0.017kgm2を実現しており、大きなロボットハンド(マルチハンド)による複数個のワークの同時搬送が可能である。さらに、ロボットの表面からボルトなどを削除し、滑らかな表面とすることで、容易に清掃ができるようにしており、また、自在継手部のブッシュには、日本食品衛生法適合の自己潤滑樹脂を採用し、グリースレス化により衛生性を向上している。
一方で、製剤による清掃を想定した構造(IPx7)としており、規定の水圧による洗浄にも耐えうる構造となっている。

図1 MPP3H(左)とMPP3S(右)の動作範囲
2)アプリケーションソフトウェアMotoPick
<概要>
MotoPickは、前述のMPP3HやMPP3Sをはじめとした当社のピッキング用途のロボットと、ビジョン機器や各種センサ、コンベヤ等を使った高速ピッキングシステムを容易に構築するアプリケーションソフトである。
MotoPickを適用するシステム構成例を図2に示す。MotoPickは搬入コンベヤの上部に配置されたカメラから、バラバラの向きで流れてくるワークの位置と向きを検出して、ロボットの正確なピッキング動作を制御することができる。また、コンベヤに取り付けたエンコーダからコンベヤの移動量を読み取ることで、コンベヤトラッキングを行う(図2)。
-1024x745.png)
図2 ピッキングシステム構成例
<特長>
➀容易な設定
図3に示すような専用PCソフトの画面に従って数値を入力するだけでセットアップを容易に行えるため、ロボットの操作を熟知していない人でも、簡単にロボットの動作を調整することができる。
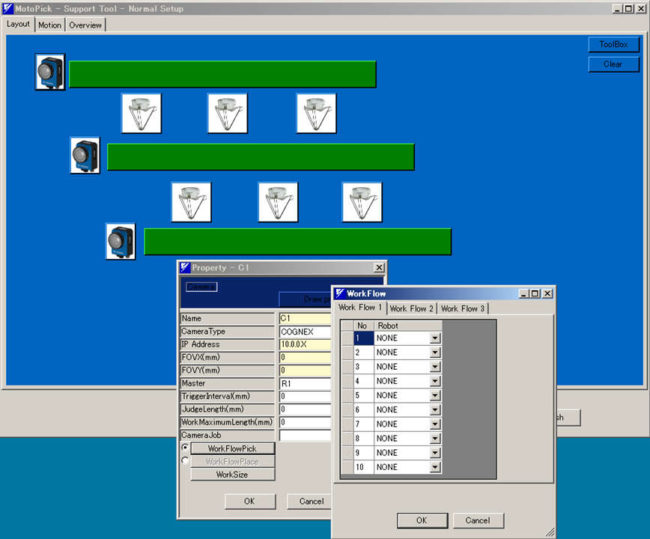
図3 MotoPick専用PCソフト画面
➁複数台ロボットへのワークの振り分け
1台のコンベヤに対して複数台のロボットを利用する場合に、図4のように各ロボットに負荷の偏りがなく、バランスよくワークを振り分けることができ、搬送効率が向上する。
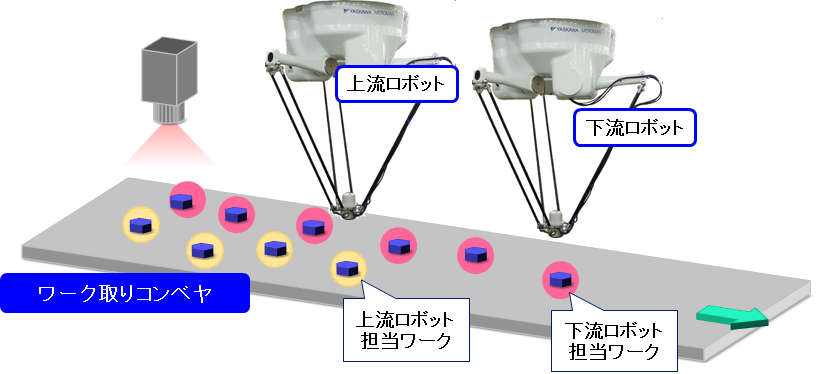
図4 複数ロボットのワーク振り分け
➂オンライン調整
専用PCソフトによってロボットの動作中に各パラメータを調整することができ、システムを稼働させながらの調整が可能なため、調整時間を短縮することができる。
④ 取りこぼし防止
図5のように、上流のロボットが取りそこねたワークデータを下流のロボットに送ることで、下流ロボットによる取りこぼしのカバーが可能である(カバーリング)。また、ワークやトレイの位置
がロボットの動作範囲を超える場合に、コンベヤを減速または停止(コンベヤ制御)することができる。これらの機能を使用することで、ワークの取りこぼしを防止できる。
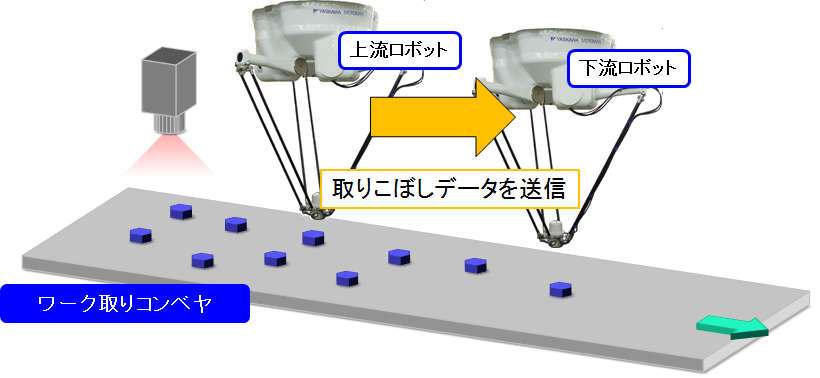
図5 カバーリング(取りこぼしデータ転送)
➄各種センサによるワークの検出
ワークの流れる状態に応じて、ビジョン、光電センサといった多様なセンサに対応している。特にビジョンを使用する際はロボットの台数にかかわらず、1つのコンベヤ上に最大5種類のワークを混在させることができ、1度の撮像で最大50個のワークの検出が可能である。
➅稼働中のPCレス
稼働中はPCを接続する必要がないため、PCに起因するライン停止やPC設置、維持管理などの問題を解消でき、搬送システムの安定度、稼働率が高まるとともに、省スペース化やコストダウンに寄与する。
人協働ロボットMOTOMAN-HC10
1)概要
多品種少量生産のような完全自動化が難しい現場では、人と機械が各々で得意な作業を分担することが必要となる。
従来、産業用ロボットは柵の中で稼動させることが必要だったため、分担作業は限定的になる上にその実現には多くのスペースと周辺機器が必要だったが、国際標準化機構(ISO)による産業用ロボットのための安全要求事項を定める規格の改正により、ISO 10218-1:2011およびISO10218-2:2011の措置を行えば、人と同じ空間でロボットを協働させることが可能となった。
当社は人と協働する作業に最適なロボットとして、MOTOMAN-HC10(以下、HC10)をラインナップしている。
2)特長
➀指や手が挟まれにくい構造
図6に示すように、指や手がロボットに挟まれにくいようにするために、ロボットアームの表面を角の少ない滑らかな形状にして表面の突出部を削減するとともに、ロボットアーム同士の間隔を空けてスペース(隙間)を確保している。

図6 ロボットアームの形状と隙間の確保
➁接触・衝突の衝撃を和らげる外皮
図7に示すように、ロボットアームと接触した際の衝撃を緩和できるロボットアームの表面に柔軟な素材の外皮をオプションとして用意している。

図7 ロボットアームの外皮
➂親和性・安全面に配慮した外観
図8に示すように、HC10は本体のボルトの飛び出しやエッジを抑えた形状とすることで、親和性・安全面に配慮した丸みを帯びた外観を実現している。

図8 HC10の外観
➃PFL(Power and Force Limiting)機能
HC10は、ロボットが人や物と接触して外部から力を受けた場合、各関節に内蔵したトルクセンサが力を検出し、力の大きさに応じてロボットの動きを制御するPFL機能を備えており、衝突や挟み込みなどの人への危害を最小限に抑えられる。
ロボット動作中の外力が、ユーザがリスクアセスメントによって決定した設定値よりも大きい場合、PFL機能はロボットを停止させる。停止後、安全が十分に確認された後にHC10に備え付けられた動作再開スイッチを人が押すことにより、ロボットは作業を再開し、速やかに作業に復帰する。
➄退避機能
PFL機能によるロボットの停止が行われない程度の小さな外力であっても、あらかじめユーザが設定した以上の力を受けると、HC10は作業を中断して退避動作を行う。人の力でロボットの動きを抑制し、衝突や挟み込みなどの危険を未然に防止できる。退避中に外力がなくなると、ロボットは自動的に作業を中断した位置に戻り、作業を再開する。
➅ダイレクトティーチ機能
図9に示すようにロボットアームを持って直接動かし、直感的に動作を教示することができる。さらにダイレクトティーチボタンを使えば、教示作業中に専用の操作ペンダントを持つ必要がなく、誰でも簡単にロボットの動作を教示できる。

図9 ダイレクトティーチ機能
むすび
多品種少量生産等、自動化が難しい作業が存在する生産現場の課題に対する、当社のロボット技術による解決策として、代表的な2つの製品を紹介した。生産現場を始めとする市場からの技術ニーズは、これからも多様化・高度化していくと考えられる。
当社は今後も従来の枠にとらわれず、ニーズに合致するロボットを積極的に開発し、人の暮らしを豊かにする技術を追及することで、産業の発展に貢献していく所存である。
◆問い合わせ先
株式会社安川電機
URL:https://www.yaskawa.co.jp/






















コメントを残す