
自動車衝突時に乗員や歩行者等の安全確保のため、様々な対策が行われている。この対策の有効性検証や有効性改善のため自動車衝突安全実験が行われているが、その重要な計測手段の1つがハイスピードカメラである。
カメラの使用方法は大きく2つに分類される。1つは衝突実験場のフロアや建屋に設置し対象物(自動車やスレッド)を外から撮影する定置カメラで、もう1つは対象物内に設置して対象物と同じ衝撃にさらされる搭載カメラである。本稿ではこれらに対応した最新のカメラシステムについて紹介する。
概要
従来機であるMEMRECAM GX-5の後継機として開発したMEMRECAM MXとMEMRECAM Q5、2つのハイスピードカメラシステムを紹介する。どちらも車載可能であり、耐衝撃・耐環境・小型で分離カメラヘッドを複数台接続できるという特徴をもっている。
MEMRECAM MXシリーズは本体(DRP)に4タイプ、カメラヘッドに3タイプを用意し、高画質・高感度・高速度を目的に開発された。MEMRECAM Q5は従来機のMEMRECAM GX-5用小型カメラ・超小型カメラをそのまま使用できるように開発され、本体を大幅に小型化した。これらのカメラを使用することで自動車衝突安全実験において新たな可視化が可能となったので、その応用例も紹介する。
MEMRECAM MXの開発経緯
自動車衝突安全実験に求められるデータ保護機能や耐衝撃・耐ESD性能、操作性改善は当然のこととして、MEMRECAM MXの開発コンセプトは高い性能(高画質・高感度・高速度)と高い運用性(細いカメラケーブル)の両立であった。
近年の半導体メモリやイメージセンサ・FPGA・CPUの性能向上を最大限に利用するという方針のもとで開発を進めたが、カメラデータを本体に直接伝送する従来の分離カメラヘッド方式で細いカメラケーブルは実現困難であった。
そこで、本体側にあった録画用メモリのみをカメラヘッド側に移動させるというアイデアを採用して問題を克服した。このアイデア(構造・組合せ)は実用新案登録済みである。
1)MEMRECAM MXカメラヘッド
表1にMEMRECAM MXカメラヘッドのラインナップと主な仕様を示す。M-CamはFull HD解像度にて2,000コマ/秒で車載・定置両方に対応している。
M-CamMFTは同じくFull HD解像度にて2,000コマ/秒であるが、レンズマウントにマイクロフォーサーズ(MFT)を採用した定置用カメラヘッドである。市販の安価なレンズが使用できることに加えて、MFTレンズに電動ズームレンズがあるのでレンズの全機能が遠隔操作可能である。
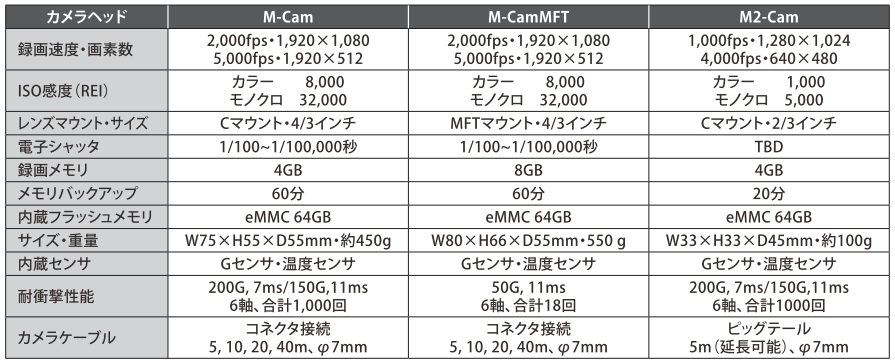
表1 MEMRECAM MXカメラヘッドのラインナップと主な仕様
M2-CamはSXGA解像度にて1,000コマ/秒の小型・車載カメラヘッドである。写真1に各カメラヘッドの外観を示す。各カメラの共通仕様として、カメラケーブルは三重同軸ケーブルで直径約7mm、内蔵バッテリによるメモリバックアップ機能に加えて、内蔵フラッシュメモリへの記録も可能である。内蔵Gセンサによるトリガ機能や内蔵温度センサによる加熱防止自動シャットダウン機能もある。

写真1 左:M-Cam/中:M-CamMFT/右:M2-Cam
2)MEMRECAM MX本体
表2にMEMRECAM MX本体のラインナップと主な仕様を示す。
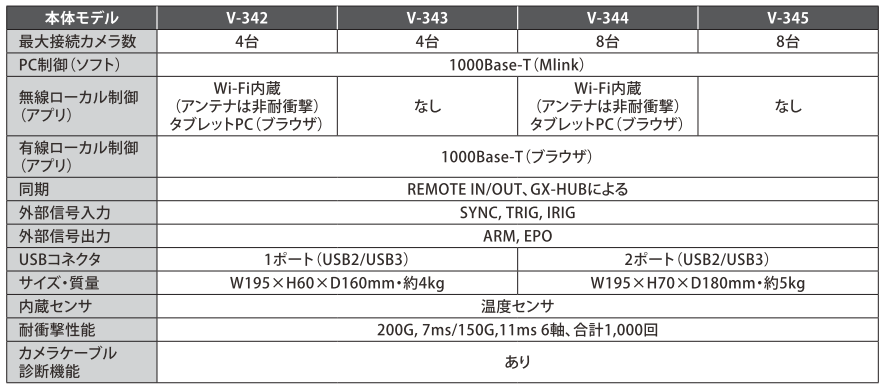
表2 MEMRECAM MX本体のラインナップと主な仕様
無線LAN(IEEE802.11 b/g/n 2.4GHz帯)の有/無と接続カメラヘッド数4/8の組み合わせで4モデルとなっている。複数台カメラヘッドが接続できるため、追加機材なしで同期撮影が可能である。従来と異なり、ローカル制御(無線/有線)に専用リモコンやモニタではなく、市販のPCやタブレットを使用するという特徴がある。
本体内にHTTPサーバ機能をもたせ、nac WebPanelと呼ぶWEBアプリをWEBブラウザで表示・操作することで、カメラ設定、画角、ピント、明るさ等の調整から録画、再生制御、本体に接続したUSBストレージへのデータ保存までが可能となっている。写真2に本体外観を示す。

写真2 MEMRECAM MX-5 8ch
MEMRECAM Q5の開発経緯
従来機であるMEMRECAM GX-5用に種々の小型カメラヘッドが開発された。これらの資産を有効利用するため、カメラヘッドはそのままでで、できるだけMEMRECAM Q5本体を小型にするというコンセプトで開発を行った。
1)MEMRECAM Q5用カメラヘッド
MEMRECAM Q5用カメラヘッドは次のとおりである。感度や大きさ、構造で種々のバリエーションがある。
• μ-Cam:超小型(15×16mm角)カメラヘッド、中継BOXあり、ケーブルの向きが異なる2種類
• C-Cam:超高感度カメラヘッド。ISOカラー8,000/白黒50,000、ケーブルの向きが異なる2種類
• S2-Cam:小型(25mm角)カメラヘッド、中継BOXあり、ケーブルの向きが異なる2種類
• P2-Cam:ペンシル型カメラヘッド、ケーブルの向きが異なる4種類
本稿では、世界最小であるμ-Camについて紹介する。μ-Camは光学サイズ1/3インチ、640×480画素のCMOSイメージセンサを採用している。このセンサは他のカメラヘッドのセンサと比べて、若干、性能が低い。
そこで、新たな画像処理技術を開発した。具体的には、白黒は1ラインごと、カラーは2ラインごとに間引き垂直210ラインデータに圧縮転送し、制御PCで画像補間を行って、他のカメラヘッドと同等の画像(1,000コマ/秒で640×416画素)を得ている。
垂直の解像感は若干低下するものの、従来は不可能だった狭小部撮影(例:ドアの中)が可能となった。また、中継BOXと接続するカメラケーブルは2mの長さで、コネクタにより着脱可能であり、μ-Cam用に新たな超小型レンズ開発も行ったので、運用性が大きく向上している。写真3にμ-Camとレンズの外観を示す。

写真3 μ-Camとレンズ
2)MEMRECAM Q5本体
小型化はビデオ出力とリモコン機能を本体から削除し、カメラ映像生成機能を制御PC側で行うという手法で行った。つまり、制御PCが必須である。表3にMEMRECAM Q5とMEMRECAM GX-5 4chの比較を示す。従来機と比較して、質量比では-76%、容積比では-85%の小型化を達成し、耐衝撃性能や保護機能も向上している。写真4にMEMRECAM Q5本体の外観を示す。
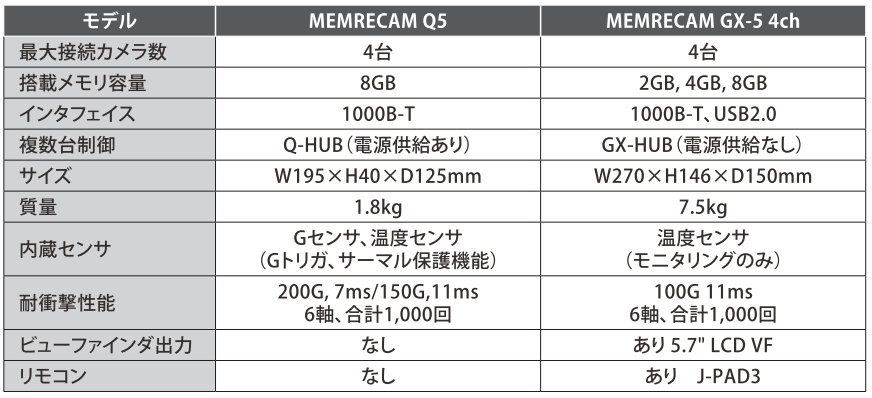
表 3 MEMRECAM Q5とMEMRECAM GX-5 4chの比較

写真4 MEMRECAM Q5本体
MEMRECAM 応用例
ハイスピードカメラ本体、および、カメラヘッドの小型化により新たな応用が考えられる。また、高解像度化によりマーカの読み取り精度向上や撮影範囲拡大が行える。本章では3つの応用例を紹介する。
1)車体下面撮影・天井撮影
自動車衝突安全実験では地下ピットを建設し、カメラと照明を地下ピット内に配置してハイスピード撮影を行っている(写真5)。同時に、天井にカメラ架台を設け、車体を上部からハイスピード撮影している。
現在は、地下ピット撮影の場合は、作業者が地下ピットに入り、画角やピントの調整をその都度行っており、作業性があまりよいとはいえない。また、天井からの撮影は、市販の一眼レフカメラ用レンズにギヤやモータを取り付けた専用のリモートレンズを製作して撮影しているが、特注の要素が高く、高価なレンズになっている。
これらのカメラをM-CamMFTにすることによって、手元のタブレット、または、制御室のPCからリモートコントロールすることができ、作業性の効率をあげることができる。さらに、安価なシステムという大きな利点がある。
M-CamMFTは、レンズのフォーカスを数値化することによって、誰が撮影しても、同じ面にピントを合わせることができるようになり、ピント合わせの個人差を軽減する。
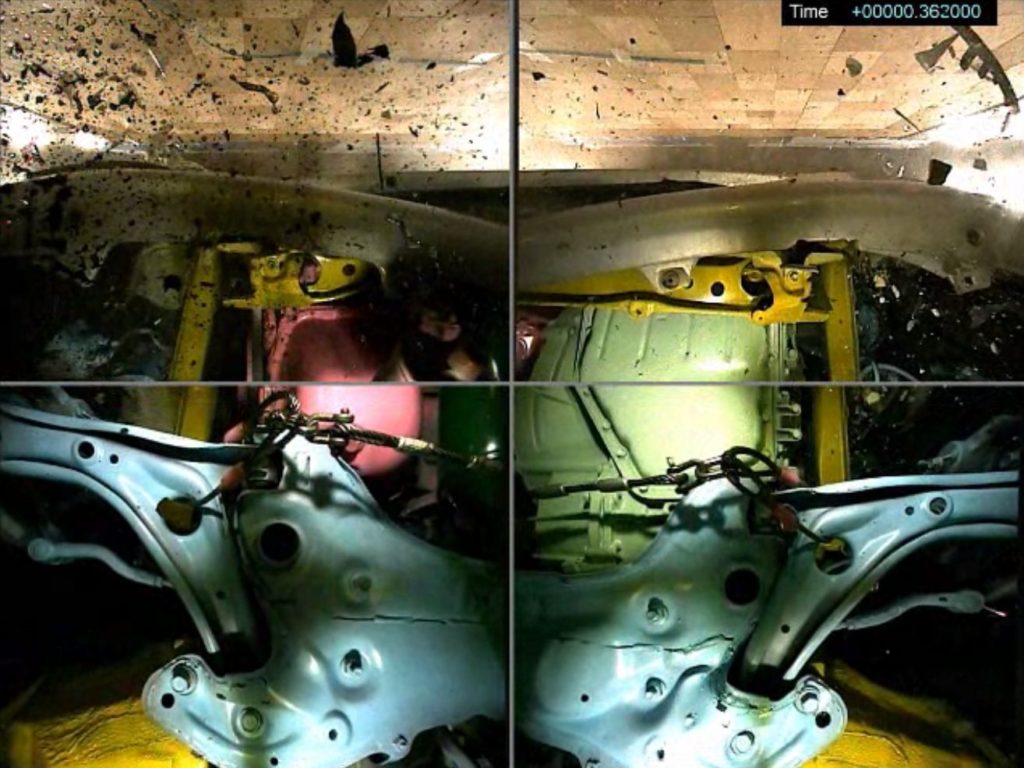
写真5 車体下面撮影映像
2)複数カメラによる3D解析
複数台(2台以上)の小型カメラとマーカによって3D解析が可能となる。図1に計測例を示す。この例ではμ-Cam カメラヘッド 2 台とMEMRECAM Q5で凹凸路面走行時のサスペンション挙動を計測している。
撮影に当たっては立体チャートによる3Dキャリブレーションが必要であるし、マーカを正しく検出するために適切なLED照明が複数台必要となる。3D解析は弊社解析ソフトウェアMOVIAS Neo 3Dを使用した。
3D解析は、自動車研究に限らず、人体計測や物体の挙動解析では、よく行われているが、狭小部の変位を3次元で解析し、CAEなどのシミュレーションと比較することは、意外に行われていない。ナックの超小型カメラヘッドによって、このような計測は初めて実現できたと言える。
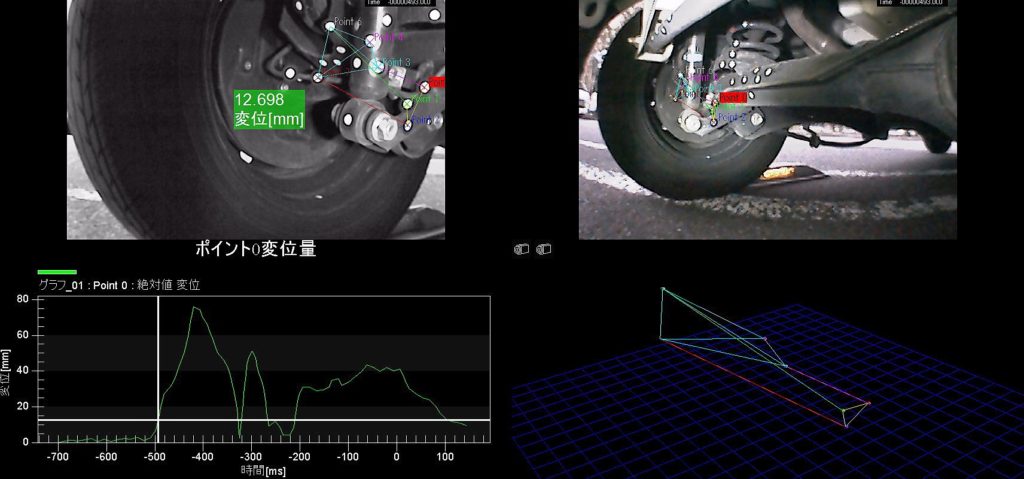
図1 MEMRECAM Q5とμ-Camによる走行実験(リアサスペンションの3D計測)
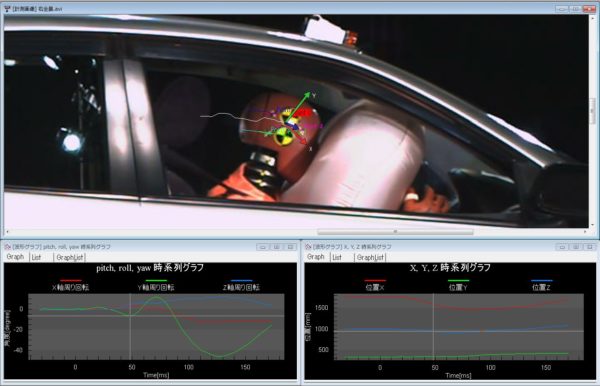
3)カメラ1台による6DOF計測
弊社解析ソフトウェアMOVIAS Neo 2Dのオプション機能として追加された2D-6DOF計測機能について紹介する。MEMRECAM MXによってマーカの読み取り精度が向上するため、今後の発展が期待される。
計測の前提としてカメラは1台であり、計測対象は変形のない剛体であること、1つの剛体について常に4点以上のマーカが撮影されていること(同一マーカの必要はない)、全マーカの3D座標値があらかじめ計測されていること(CSVデータでMOVIAS Neo 2Dへ搬入)という条件を満たす必要がある。
計測結果として、時間軸に対する 3D 座標(X、Y、Z)と回転角(ロール、ヨー、ピッチ)の6つのデータが得られ、追尾原点(ユーザ定義)のデータをCSVで出力できる。衝突時のダミーヘッドの挙動を3D解析することを目標に開発した。図2に計測例を示す。この例では大きめのマーカが2つ、小さいマーカが3つ、合計5つのマーカが使われている。
この機能のリリース後、車体の変形しない部分とダミーヘッドの両方(つまり、2つの剛体)にマーカを貼って計測することで、車体のマーカを使って動的に3次元空間のキャリブレーションが可能なこと、車体座標系へダミーヘッド座標系が反映できることがわかったので、この機能を組込み中である。この方法を使うとマーカさえ撮影できていればカメラが振動しても、問題なく解析できる。
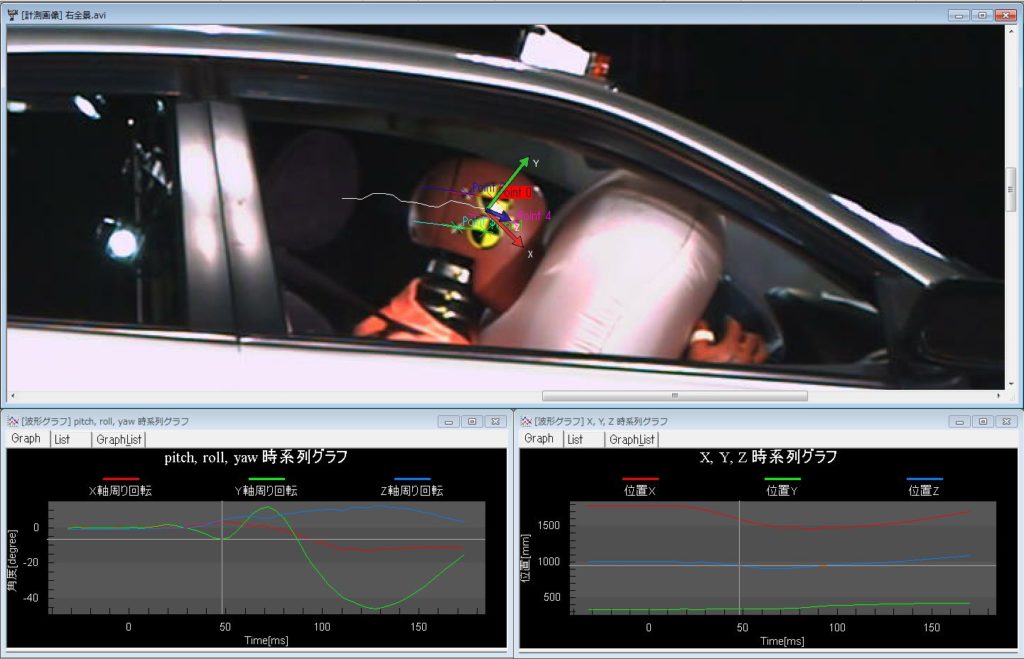
図2 2D-6DOF計測例
今後のロードマップ
MEMRECAM MXカメラヘッドは様々な解像度や録画速度を実現できる可能性をもっている。市場の要望に応えるため適切なイメージセンサを使ってラインナップを広げるとともに、たとえば、3次元解析など産業や学術研究の幅広い研究実験テーマに対応したシステムに構築していく予定である。
■問い合わせ先
株式会社ナックイメージテクノロジー
TEL:03-3796-7900
E-mail:keisoku@camnac.co.jp
https://www.nacinc.jp/

-300x200.jpg)



















コメントを残す