
カワダロボティクス(以下、当社)が、日本のものづくり企業における労働力不足の解決策として 「人と一緒に働くヒト型ロボット」をテーマに開発した『NEXTAGE』を市場に提案してから10年を経た。本稿では、国内の様々な現場で活用されている『NEXTAGE』の概要と適用事例について紹介する。
はじめに
少子高齢化や若者の製造業離れ等、国内のものづくり業界では、労働力の確保が深刻な課題となっている。繰り返しの多い単調な作業に従事する作業員を確保することは困難であり、従来人手に頼っていた作業の自動化・省人化は、喫緊の課題となっている。
大量生産の生産ラインではかなり自動化が進んでいるものの、近年の多様な顧客嗜好へ対応するための多品種少量、変種変量の生産ラインでは、まだ多数の人手作業が必要であり、人手作業の新たな自動化アプローチとして、人との共存環境で協働が可能なロボットの導入が期待されている。
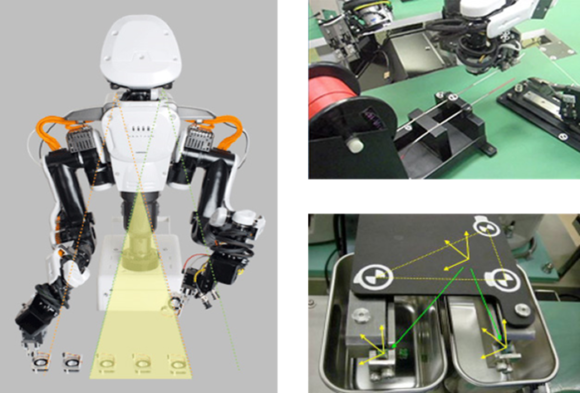
当社が人に替わって人手作業の省人化として提案しているのは、人と共存する環境で作業することをコンセプトに開発された、ヒト型の作業ロボット『NEXTAGE』の活用である(写真1)。

写真1 ヒト型ロボット『NEXTAGE』
2009年のコンセプト発表から足かけ10年、2018年現在では、自動車部品・電気機械業界の組立・検査工程、化粧品や日用品業界の梱包・出荷工程など、幅広い分野に導入されるに至っている。
NEXTAGEは、頭部と手先に備えたカメラを利用して、周囲の環境や作業対象物の位置を認識しながら作業することにより、それまでの人の作業環境をそのまま活用した自動化を可能にしている。
NEXTAGEは、全可動軸を80W以下の省出力にしているため、人が近くにいるような環境でも安全に作業することが可能である。
本稿では、製造業を中心とした様々な業界の幅広い作業工程で、多くの人手を必要とする労働集約的プロセスの省人化・自動化のアプローチとなりうる、このヒト型ロボット『NEXTAGE』を紹介する。
人と一緒に働くヒト型ロボット『NEXTAGE』の開発
NEXTAGEは、単に垂直多関節のロボットアームを2本持つという「双腕型」ではなく、開発のスタート時点から「ヒト型(ヒューマノイドロボット)」である、というユニークな開発経緯をもつ。
カワダロボティクスのロボット開発は、1999年~2002年の間に、東京大学からの受託開発、および、経済産業省が主導するプロジェクト「人間協調・共存型ロボットシステムの研究開発(HRP:Humanoid Robotics Project)」へ参画し、ヒューマノイドロボットの設計製造を担当したことに始まる。
成果機であるHRP-2は、15年以上経った現在でも、国内外の複数の研究機関で利用され続けているヒューマノイドロボットの研究用プラットフォームである。
NEXTAGEは、当時から社会問題化していた日本国内のものづくり企業における労働力不足の課題に対応すべく、人間と協調・共存可能な「人と一緒に働く」ヒューマノイドロボット技術の事業展開のなかで製品開発された「上半身型」ヒューマノイドである。
このように従来の産業用ロボットとは異なる出自をもつNEXTAGEは、従来の産業用ロボットのように人よりも早いスピードや強いパワーを備えた「人間にはできないことができる機械」ではなく、「人が行っている作業を人と同じように実施する」仕様となっている。
NEXTAGEは、人と同程度のスピードとパワー、人と同じディメンション、そして人と同じように冶具や周辺機器を扱う、というコンセプトで開発された。
2009年11月の国際ロボット展でコンセプトモデルが発表されたNEXTAGEであったが、販売開始から2年経った2012年に、グローリー株式会社(埼玉工場)の通貨処理機の組立工程におけるNEXTAGEを活用した生産ラインが、第5回ロボット大賞・次世代産業特別賞を受賞。
翌2013年には、第5回ものづくり日本大賞経済産業大臣賞を受賞し、電機・電子部品・自動車部品などの組立・検査工程などを中心に、多数の工場の生産ラインへ導入が拡大した。
近年では、化粧品・日用品の大手企業である資生堂・花王の導入事例が公表されたことにより、従来型の産業用ロボットでは自動化が難しかった、いわゆる三品業界(化粧品・医薬品・食料品)の梱包・出荷工程への導入も進んでいる。
発表から10年、幅広い分野で活用いただけるようになり、これまでお客様にいただいた有益なご意見やご要望を取り入れ、2018 年には、従来のNEXTAGEよりペイロードアップ、ビジョン高速化、メンテナンス性向上を実現したNEXTAGE新型モデル『NXAシリーズ』を発表した。
NEXTAGEの特長
NEXTAGEの外観寸法図および動作範囲図からわかるように、NEXTAGEの作業領域、占有するスペースは、人と同程度である(図1)。
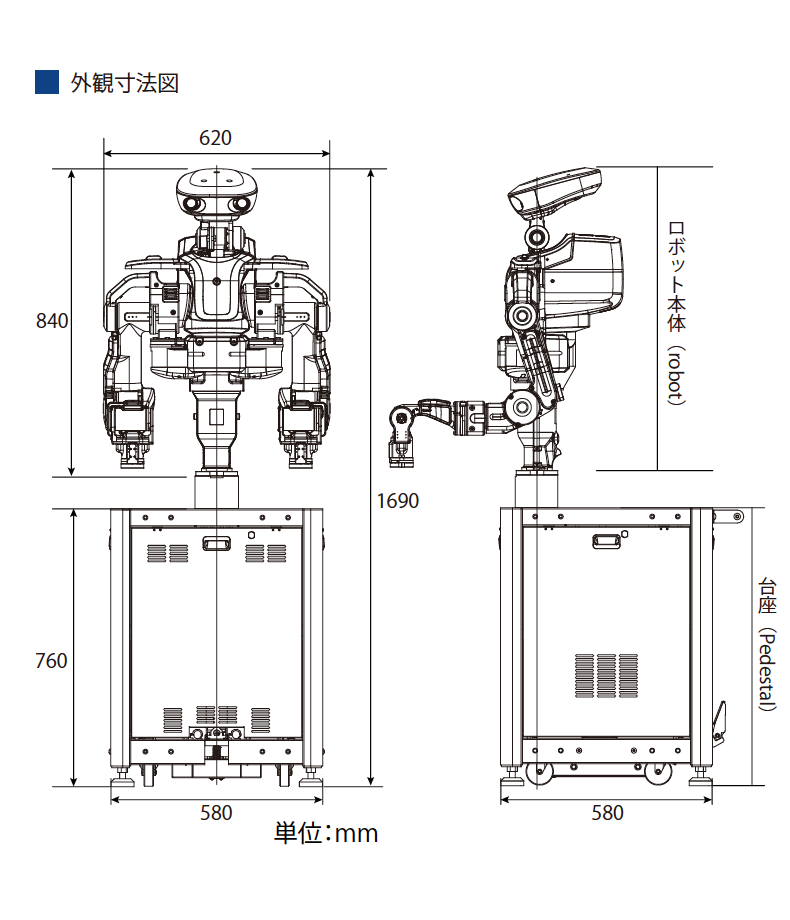
図1 外観寸法図
NEXTAGEの軸構成は、片腕6軸の双腕、頭部ステレオカメラの縦振り・横振りの首2軸、胴体を回転させる腰1軸の計15軸である。肩ヨー軸からはじまる腕の軸構成は、肘を横に張りださないで作業を可能にしており、近くに人がいた場合に不意にぶつかることがないよう、安全に配慮したものである(図2)。
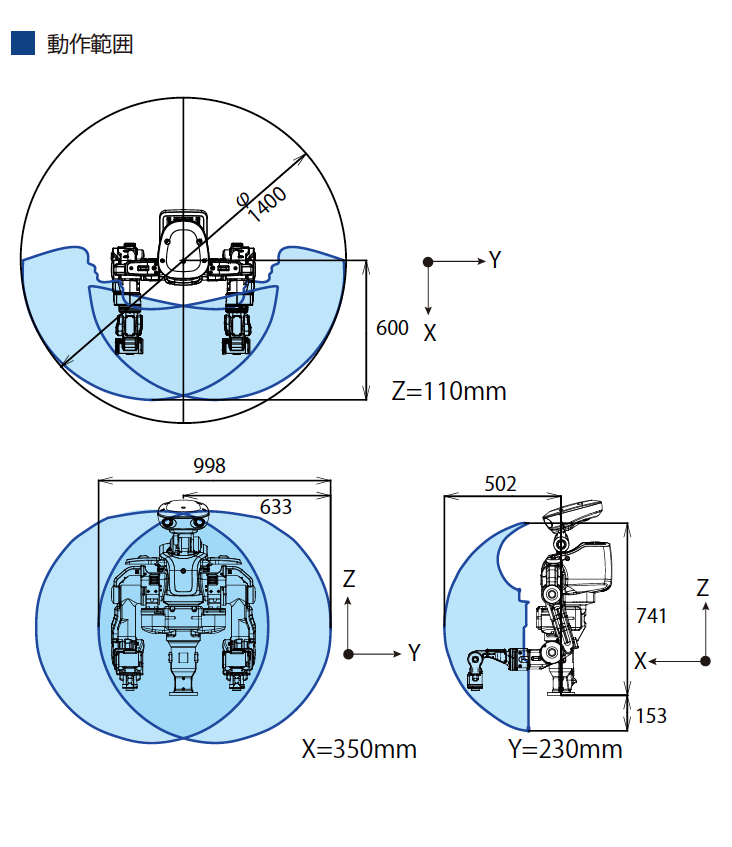
図2 動作範囲
台座部分に、ロボット制御用のコントローラや視覚処理システム、さらに入出信号制御や空圧制御用のインタフェイスユニットを収納可能であり、ロボット本体+台座スペースのみで作業機能全体が収まる。
また、すべての軸は80W以下のアクチュエータで構成されており、適切なリスクアセスメントのもと、安全柵なしのレイアウトでの運用が可能である。
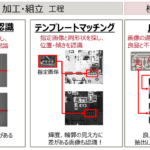
NEXTAGEは、頭部のステレオカメラを用いて、作業台やツールなどに貼られた「クロスマーク」と呼ばれるシールで周囲の環境を把握し、画像認識による位置決めを使った高精度の作業を実現している。
3個以上のクロスマークを1セットとする「マーカ」認識機能を使って、ロボットから見た作業台上のツール・治具、ワークの相対的な3次元位置を特定できる。
画像認識によって作業するための位置決めを実現したことにより、従来の産業用ロボットのようなアンカーボルトで床に固定する使い方ではなく、ロボットを移動して作業させるような使い方が可能となった。
たとえば、作業内容にちょっとした変更があったときに、ロボットや作業環境自体を動かす、作業者がロボットに代わり作業するために一時的にロボットを生産ラインから外す、移動台車にロボットを搭載してステーション間を移動しながら作業する、というような使い方も可能である(写真2)。
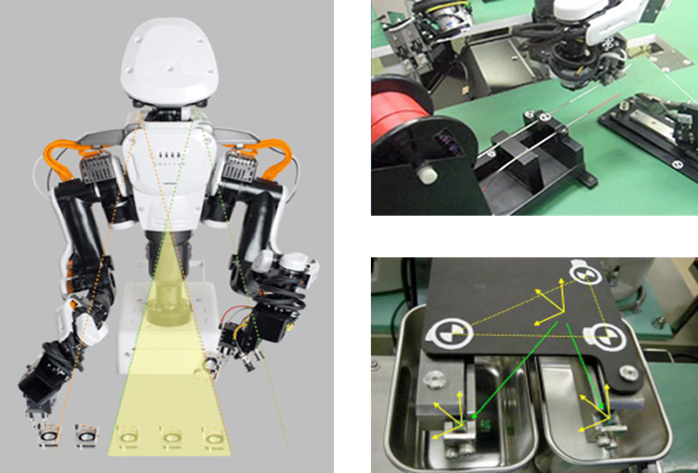
写真2 簡便設置機能:画像認識を用いた位置決めによる作業
NEXTAGEによる人手作業工程の自動化で特徴的なのは、人が実際にやるような手順、方法をそのまま置き換えて考えることができる点にある。
たとえば、電機分野の組立工程において、ケーブルやゴムバンド、シールなどの柔軟物を取り扱うような難しい作業でも、人が指や道具を使って行うのと同じコンセプトでエンドエフェクタ(ハンド)を設計する。
また、セル生産において人手工程でのLCA(ローコストオートメーション)を実現するために工夫されてきた「からくり治具」のコンセプトを、そのままNEXTAGEに継承することにより、生産ラインの自動化を実現してきている。
マテハン、仕分け、梱包などの工程においても、このようなヒト型ロボットならではの特長を活かすことにより、新たな自動化アプローチが可能となる。 NEXTAGEの双腕と画像処理による複雑で器用な動作のティーチングは、標準搭載のNxProductionにより、プログラミング技術がなくても容易にティーチングすることが可能である。
NxProductionは、NEXTAGEの操作・ティーチング・生産を行うことができる、標準搭載ソフトウェアとして開発された(図3)。NxProductionによるティーチングは、グラフィカルなインタフェイスで直感的に操作でき、現場オペレータによる修正・調整が容易である。

図3 NxProduction:メイン画面
計画した作業手順にしたがって、ティーチングポイント・視覚処理・外部入出力(I/O)をGUI 上の表の各項目に登録していく「ワークフロー」形式で行うため、プログラミングスキルがなくても画像認識を取り入れた作業を容易に作成することができる(図4)。
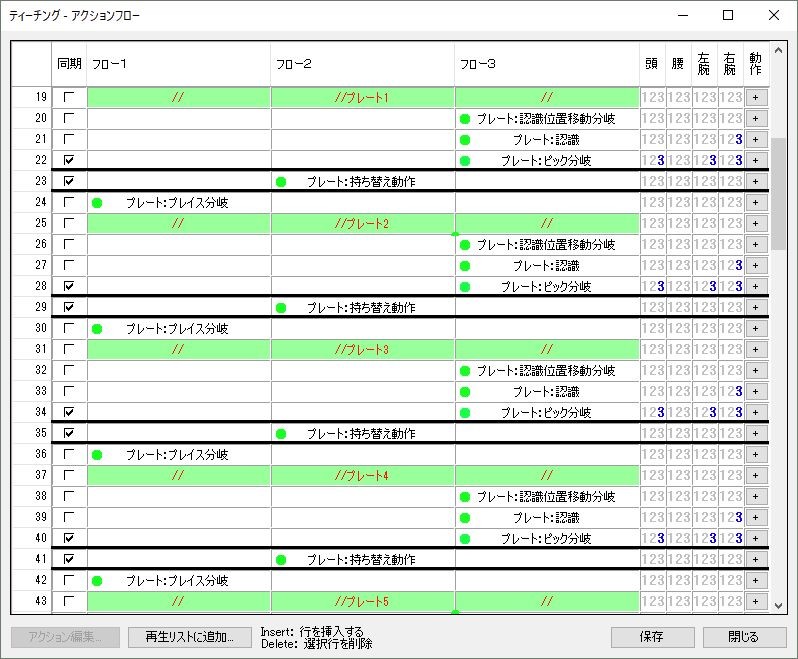
図4 NxProduction:アクションフロー画面
また、NxProductionは、プラグイン形式により、ビジョンを含む機能を追加可能である。NEXTAGEを移動させても作業を継続できる「簡便設置」機能は、標準構成である「マーカ認識モデル用プラグイン」で実現されている。
周辺環境に貼付されたクロスマークを基準とした座標系を認識して、その座標系でワークをハンドリングすることができる。また、よく使われる視覚認識機能のビジョンプラグインとして、二値化位置推定、トレイ上整列ワーク認識、正対化二値化真偽判定もオプションとして用意されている。
NEXTAGEの適用
NEXTAGEは汎用性が高く、組み立て、専用機への挿入・排出などのロード/アンロード、包装・仕上げ、そのほか、検査や箱詰めなどの幅広い工程の作業に適用可能である(図5)。

図5 NEXTAGEの適用例
単一の作業をひたすら繰り返すような工程よりは、複数の作業を組み合わせた多能工的な工程に適用することで、導入効果を高めることができる。
今後導入が広まると考えられる物流分野での適用例として、2018 年国際物流総合展で展示した 物流倉庫をイメージした「ピッキング作業」のデモンストレーションを紹介する(写真3)。

写真3 国際物流総合展2018でのピッキング作業デモ
このデモでは、NEXTAGEは、移動ユニット(SLAM式AGV)に搭載され、およそ3m×3mのエリアの中を自由に動いて、棚から部品をピッキングし、ステーションに出荷する(図6)。
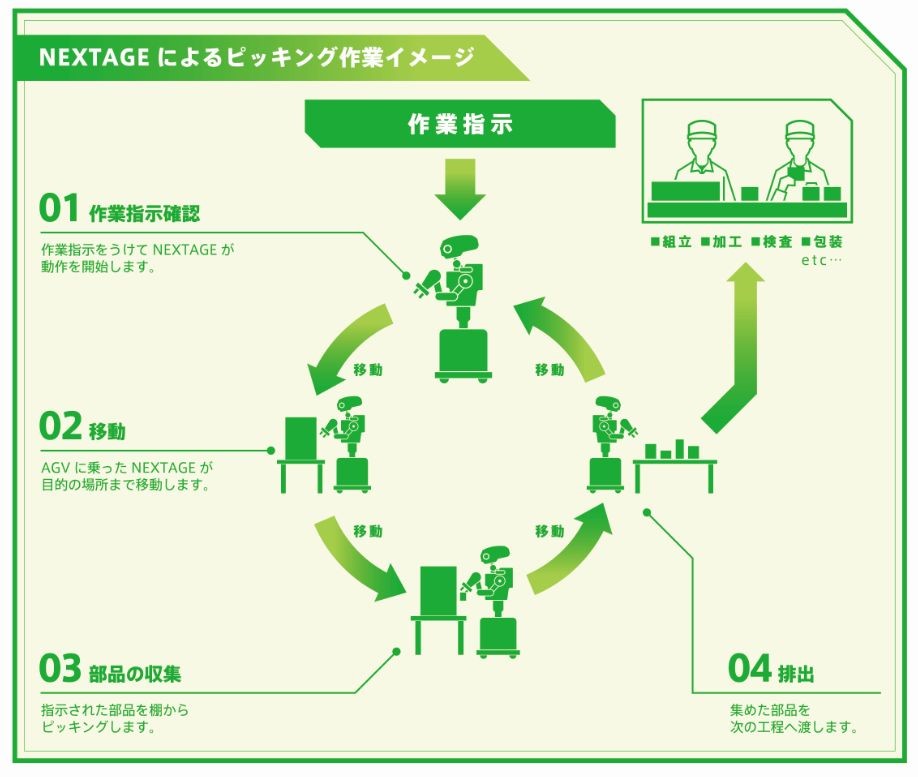
図6 NEXTAGEによるピッキング作業イメージ
双腕を使うことで、引出し付の棚から部品を取り出したり、トレイに部品を並べたりする作業を、特別な装置や冶具を使わずに実演した。また、簡便設置機能をもつNEXTAGEを移動ユニットに搭載することより、各ステーションでピッキングや梱包、検査、配膳などの複数作業のデモを実演した。
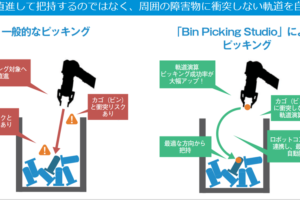
今回はデモのため、単純な形状のワーク(対象物)を選択し、シンプルなチャックハンドや吸着ハンドでハンドリング可能なところや移動機能と組み合わせた作業を見せたが、実際のピッキング作業の現場はもっと複雑で、ワークも多種多様な形状のものが存在する。
ハンドを取り替えながら作業ができるというNEXTAGE自身の特長に加え、トレイやカートなど周辺環境に工夫を凝らすことで効率良く自動化を実現することが可能となる。
さらに、NEXTAGEの汎用性を活かし、前後工程の組立・加工・検査・包装などの作業と合わせて、人とロボットの作業を分担しなおすことにより、NEXTAGEの導入効果を増大させることができる。
まとめ
ヒト型ロボット『NEXTAGE』は、従来の産業用ロボットでは効率的な自動化が難しかったような人手作業にも適用可能な汎用性をもつ。
汎用性の高い作業力をもつヒト型ロボットは、自動車・電機・半導体など従来からロボットが導入されてきた業界だけではなく、医薬品・化粧品・食品などのいわゆる三品産業、さらに物流関連まで、幅広い種類の人手がかかっている労働集約型工程に適用可能性がある。
今後は、ロボットの使いやすさや安全性の開発をさらに進め、システムインテグレータや導入先のお客様をパートナーとして、現在人手がかかっている作業をアプリケーション化していくことにより、ヒト型ロボットによる、人とロボットの協業を広めていく計画である。
※映像情報インダストリアル2019年1・2月号『自動化を実現する産業用ロボット』特集より転載
■問い合わせ
カワダロボティクス株式会社
TEL.03-5830-3951
E-mail:info@kawadarobot.co.jp
https://www.kawadarobot.co.jp/






















コメントを残す