
SICKのポートフォリオ「ロボットビジョン」では、自動化されたロボット支援型ハンドリングプロセスにおける2Dおよび3Dでのパーツ位置特定に適した、一連の革新的なソリューションが提供されている。
ロボットビジョンは、測定範囲、視野と視覚容量、分解能、またはパーツの動きによって定義されるタスク内容に応じて、ストリーミングカメラ、ビジョンセンサ、スナップショットカメラまたはスマートカメラがロボットの「目」として機能する。インストールと操作については、システムソリューションを簡単に統合し、素早く動作準備完了状態を確立できなければならない。
具体的には、システムはあらかじめ設定済みで、各アプリケーションに応じて最適化された照明装置がすべて装備されており、多種多様なパーツをセンサまたはCADシステムから学習することが可能である上、パーツ測定およびロボットコントローラとの直接通信に必要なソフトウェアツールもすべて備わっている必要がある。
貨物キャリア、パレットケージ、トートボックスや搬送コンベアベルトでのパーツ位置特定用の統合型システムソリューションは、動作中に高性能を発揮し、きわめて高い精度、繰り返し精度と信頼性、短いサイクルタイムおよび高い稼働率を特長とする。
貨物キャリアでの3Dパーツ位置特定
搬送台から車両ボディ用板金をピックアップする際、ロボットの視覚ガイダンスは、貨物キャリアでのパーツ位置特定のために使用される。SICKのロボットガイダンスシステムPLRは、この工場出荷時にすでに校正済みのスタンドアロン型システムソリューションで、わずか数秒で完了できるインストール、設定およびコミッショニングに必要となるセットアップ機能のすべてが、操作しやすい状態で統合されている。
またウェブサーバが統合されているため、どの標準ブラウザでも操作が可能。PLRのアイセーフレーザセンサは直接ロボットアームに取り付けられた状態で、貨物キャリアならびにその中にあるパーツの正確な位置を測定できる。
ロボットステーションでの貨物キャリアの不正確な配置、搬送時に動いてしまったパーツ、または生産に起因した寸法のずれが原因で位置に誤差が発生した場合、システムはパーツの反射やその他の環境要因が存在する可能性があっても、それらに干渉されることなく誤差を補正する。それに加えて、システムはパーツをピックアップするためにロボット制御の座標系に正確な3D把持座標を提供する(図1)。

図1 3Dパーツ位置特定
ロボットは自動的にラックからパーツを把持する。ビジョンシステムは、パーツの把持位置を見つけ、ラックの位置誤差に関係なくロボットを適切な位置まで制御する。
トートボックスにアームを伸ばす際にパーツ位置を正確に特定
たとえば機械へのローディングなどを行うため、あらかじめ配置されているか、無秩序に並んでいるか、または積み重ねられたパーツをロボットがパレットケージやトートボックスからピックアップする必要のある用途がある。
SICKの開発したロボットガイダンスシステムPLBには、あらかじめ設定済みのコンプリートソリューションとして、解像度の高い3Dスナップショットカメラ、3D形状比較およびパーツ位置特定用の高性能ソフトウェアと、ロボット統合に必要なあらゆる測定/通信ツールが構成されている。そのためPLBはハードウェア側でもソフトウェア側でも、即座に使用することができる。 同時に、いくつもの優れた特長がある。
たとえば、新しいパーツはCADを介して柔軟に学習し、ロボット支援型パーツハンドリングに適用することができる。また、金属表面の3D検出がソフトウェアの面で最適化されているため、板金や旋盤加工/鍛造/鋳造部品などの反映や反射が、信頼性の高い測定機能および位置特定の測定正確度に悪影響を及ぼすことはない。
さらに、測定の短いサイクルタイム内でロボットガイダンス用の正確な実座標を提供すると同時に、パーツをピックアップするためグリッパを位置決めする際に、トートボックスとの衝突を回避する(図2)。
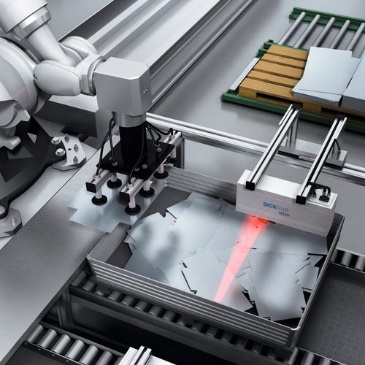
図2 パーツ位置を正確に特定
3DカメラRulerは高精度のスキャンによりトートボックス内の一番上にあるシートメタルパーツとその位置を特定するための、正確な位置決めデータを提供する。パーツを事前に仕分ける手間は不要。
静的および動的な用途での2Dロボットガイダンス
自動2D対象物位置特定に使用するシステムには、照明が内蔵され、レンズのフォーカス方法が固定式または可変式から選択可能な高性能2Dカメラと、高性能位置特定アルゴリズムと統合型動作同期を搭載したセンサソフトウェアが含まれる。
コンベアトラッキングシステムにより、搬送コンベアベルト上にあるパーツが動いた場合でもそれを検出して、ロボットに適切な把持座標を提供することが可能になる。SICKのロボットガイダンスシステムPLOC2Dは、一貫してセットアップ時間の最短化を目指して設計されている。
これは特に、ウェブベースのユーザインタフェイス、特殊なソフトウェアやビジョンに関する特別な専門知識や別のPCがなくても簡単に行えるコミッショニング、さらに様々なパーツに適した操作しやすいイージーティーチ学習方法に反映されている。また、多種多様な型式のロボットとそのコントローラへの統合に適したあらゆる機能も標準装備されている。
そのため、毎分120個以上のパーツの位置を特定でき、たとえばコンベアベルト上のパンチングパーツの位置特定、動作中のパーツの把持、動的な二次包装工程での商品位置特定やロボットによる様々なパーツの仕分けなど、様々な用途に使用することができる(図3)。
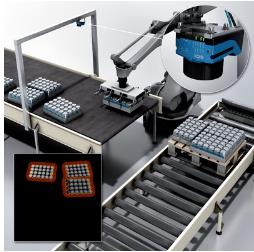
図3 2Dロボットガイダンス
センサシステムPLOC2Dは、自動 2D 対象物位置特定に使用する。高性能位置特定アルゴリズムと統合型動作同期により、搬送コンベアベルト上にあるパーツが動いた場合でも検出して、ロボットに適切な把持座標を提供することが可能になる。
ロボット工学向けのSICKセンサソリューション
SICKはロボット工学でのあらゆる課題に対して、適切なソリューションとしてロボットビジョン、Safe Robotics、アームエンドツーリングと位置フィードバックを提供している。
1)ロボットビジョン
ロボットビジョンの光学式カメラベースシステムは、ロボットの目として活躍し、人間と材料の検知を可能にする。2Dおよび3Dでのロボット視覚ガイダンスにより、生産/取付/組立/ハンドリング工程で、高度に柔軟かつ生産的な自動化ソリューションが可能になる。その例としては、接着ビードを塗布する場合、溶接シームを点検する場合や「ボックスにアームを伸ばす」場合などが挙げられる。
2)Safe Robotics
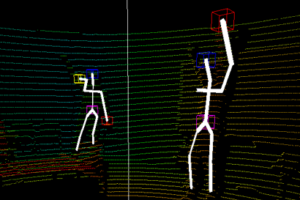
Safe Roboticsとは、人間の安全を確保するためのソリューションを意味している。このソリューションには、注意を要するロボットの近接範囲を安全な作業場所にするためのあらゆる措置が含まれている。
ロボットの周辺環境の適応認識は、インテリジェントで頑強な信頼性の高いセンサと安全志向のシステムを使用して行われる。これにより、ロボットの作業領域に妨害なしで安全に介入することが可能になると同時に、人間との密接で安全な共同作業も実現する。
3)アームエンドツーリング
アームエンドツーリングでは、グリッパとロボットツール向けに、ロボットの感度を最高レベルに引き上げて、微妙なタッチでの作業を可能にする、洗練されたインテリジェントなセンサ技術を提供している。このポートフォリオは、グリッパアームとそれに対応した供給システムを使用したあらゆる用途をカバーしている。
4)位置フィードック
位置フィードックに関するSICKのソリューションでは、駆動装置に組み込まれたモータフィードバックシステムが、速度および位置ならびに駆動装置の状態に関するデータを供給する。つまりこのスマートモータセンサは、ロボットの全動作の知覚基盤を形成する。
おわりに
産業用ロボット工学は、明日に向けた将来性のある自動化コンセプトにとって決定的な刺激剤となっており、人間とロボットが様々な作業場面で「同僚」として密接に協力する傾向が強まっている昨今の状況では、その重要性がさらに高まっている。
ここで、ロボットに周辺環境を正確に認識する能力を与えて、対等な立場で共同作業するための前提条件を作り上げているのは、センサにほかならない。SICKはこれからもお客様の目線に立って最適なソリューションを提供していく。
■問い合わせ先
ジック株式会社
TEL:03-5309-2115
E-mail:support@sick.jp
http://www.sick.jp/























コメントを残す