
産業ロボットにとって苦手なアプリケーションの代表として認知されてきた 「バラ積みピッキング」が、この1~2年の間に起きた技術革新の中で、自動化が飛躍的に進んでいる。
「バラ積みピッキング」の歴史を紐解きながら、なぜ今あらためて 「バラ積みピッキング」なのかに焦点を当てながら、今急速に欧州で力を付けているPhotoneo社の製品を詳しく紹介する。
背景
工場の生産ラインにおいて、バラ積みされた部品のピッキングは人手で行われることの多い作業である。これを産業用ロボットで自動化するべく、10年以上前から 「バラ積みピッキング」 としてロボットメーカやインテグレータ各社が取り組んできたが、様々な要因から一般的に実現が難しいものと認識されている。
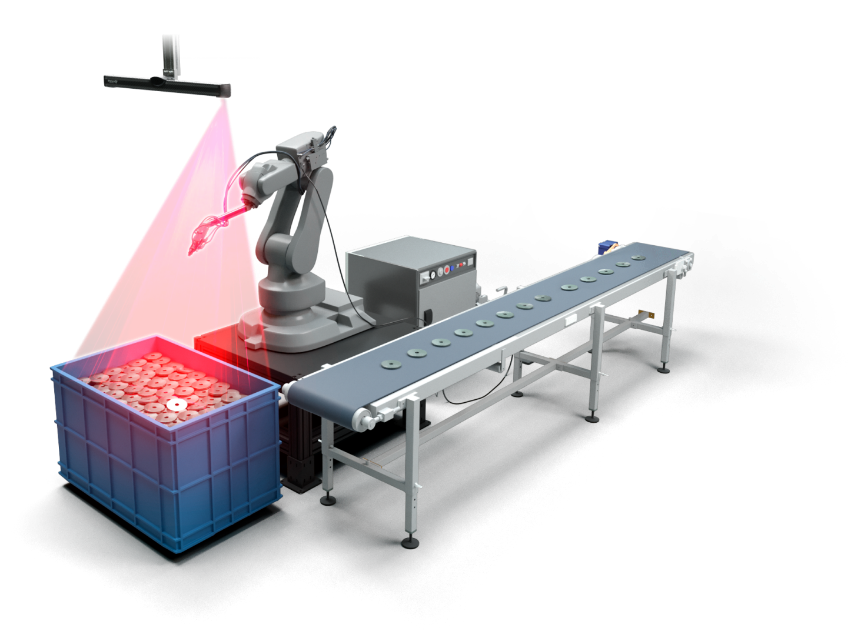
ロボットでバラ積み部品をピッキングし、
コンベヤに並べていくイメージ図
しかし何年かおきの技術革新を経て、バラ積みピッキングを容易に適用するための技術が欧州を中心に成熟しつつある。未だに人手で行われることの多いピッキング作業を簡単に自動化できることのメリットは、ユーザにとってもロボットメーカにとっても非常に大きい。

バラ積みされた部品の例
本稿ではそうした自動化の現況と、中でも優れたトータルソリューションとして画像センサから軌道演算までを一貫したパッケージ製品で提供するメーカPhotoneo社の最新技術を紹介する。
「バラ積みピッキング」 の歴史
自動車工場などにおいて使用される部品は、一般的に部品箱にバラバラの状態で積まれた状態となって納入されることが多い。「バラ積みピッキング」 を実現するためには、まずこの部品箱全体を3Dカメラで撮影し、3D CADとのマッチングを取ることでピッキングする対象部品1つ1つの3次元的な姿勢を算出する。
それからグリッパーの把持位置・方向を都度変えながら、周囲と衝突しないようアプローチする必要がある。「バラ積みピッキング」 の歴史とは、この一連の技術に関する革新の歴史である。
国内の事例として、産業用ロボットメーカである川崎重工業殿が取り組まれてきたバラ積みピッキングの変遷について紹介する。同社は10年以上前からバラ積みピッキングに対して積極的な技術開発を行ってきた後、弊社の取り扱うPhotoneo社の「バラ積みピッキング」に行き着いた経緯がある。
川崎重工業殿は、10年前には単眼カメラ2台を組み合わせたステレオビジョンシステムを使用していた。撮像した3Dデータ上でCADマッチングを行い、部品の姿勢を算出するシステムを構築した。
しかし、ステレオカメラでの3次元情報が貧弱で、個別の部品の角度や重なりの誤判定が起きるケースが発生し、安定したシステム構築ができず、限定された用途でのみ実用化する結果となった。
また6~7年前には技術革新したレーザースキャナを利用することでより実用的なシステムを構築したが、CADマッチングにおけるモデル登録の煩雑さが課題となり、1適用ごとに半年程度のインテグレーション期間を要するシステムとなったため幅広い用途への展開が難しい結果となった。
またさらに2~3年前より、各社の3次元センサの技術がめざましく進歩し、またCADマッチングにおけるモデル登録の煩雑さも大幅に解消され、インテグレーション期間としては約3週間程度で完了できる状態となった。
一方で、ピッキング時の周辺環境との衝突回避や把持位置設定、カメラキャリブレーション(ロボット座標系とカメラ座標系の整合機能)といった、ロボットシステムと関わり深い部分の煩雑さは依然として残っており、この点の技術革新が望まれた。
Photoneo社のリリースした 「Bin Picking Studio」は、これら既存課題をひとまとめに解消し、バラ積みピッキングを簡潔な設定のみで実現するためのパッケージ製品である。現在、川崎重工業殿ではインテグレーション期間 2日程度で完了できる最新ソリューションとして本製品を高く評価されている(図1)。
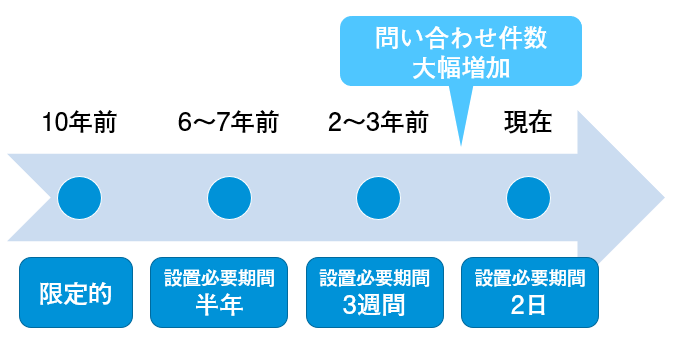
図1
バラ積みピッキング:成功するための5 要素
バラ積みピッキングを成功するための5要素として 「スキャナ」 「画像処理」 「グリッパー」 「把持位置」 「軌道演算」 が挙げられる。Photoneo社の「Bin Picking Studio」(以下、BPS)は、1製品でこれらを高度に実現するソリューションを提供している(図2)。
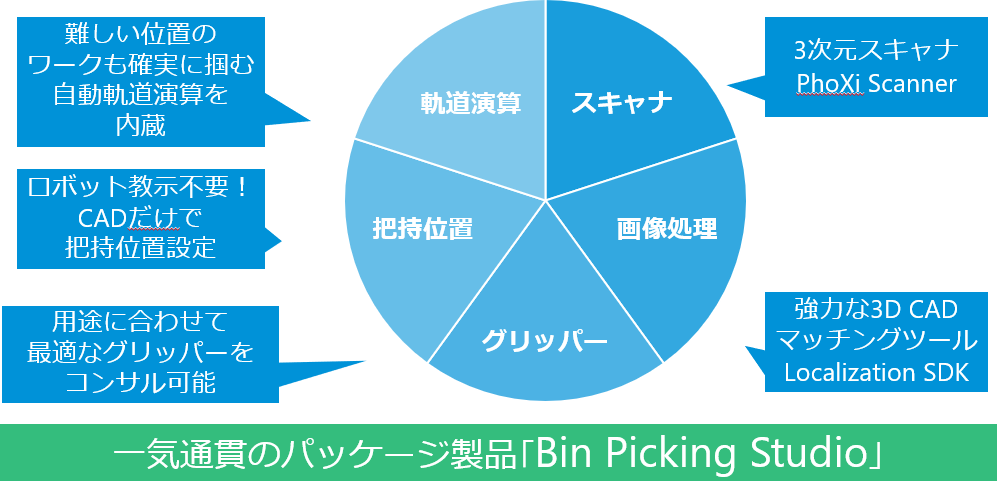
図2 バラ積みピッキング:成功するための5要素
BPSの製品構成としては図3のとおりである。
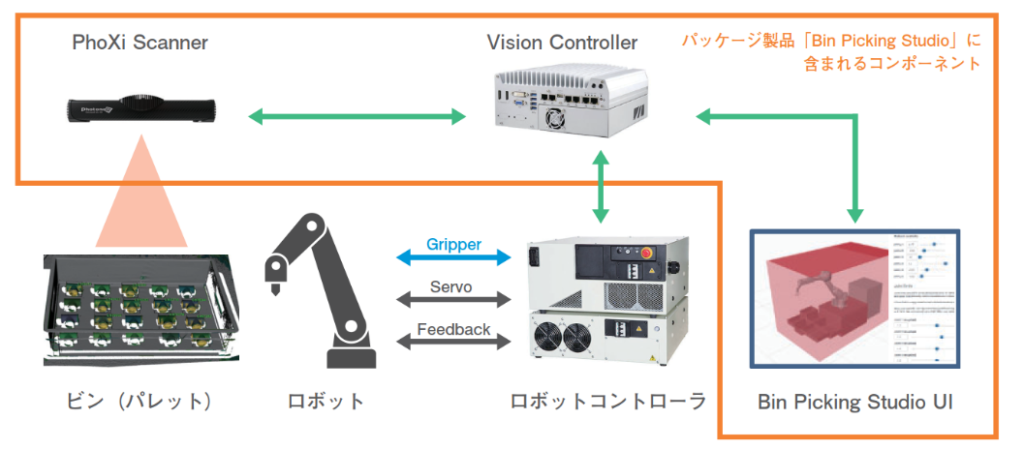
図3
このようにBPSは、Photoneo社の3Dスキャナ「PhoXi Scanner」、CADマッチングやロボットの軌道演算をするための 「Vision Controller」 から構成される。
「Vision Controller」 には、バラ積みピッキング用専用ソフトウェア「Bin Picking Studio」がインストールされており、把持位置設定など、ピッキングに必要な全設定を行うことができる。
Vision Controllerにて、ピッキング対象物にロボットがアプローチするための軌道を計算し、その情報をロボットコントローラに送信することで、ロボットは把持に最適な軌道にてピッキング動作を行う。
「Bin Picking Studio」 の特長機能
1)ロボットへの教示不要:すべてソフトウェア上で設定完了
グリッパーのCADと、ピッキング対象部品のCADをBPSにあらかじめ登録しておくことにより、対象部品のどの部分をどういった角度でピッキングするか、という把持位置設定をBPSの3Dシミュレータ上で実行できる。これにより、煩わしいロボットへの教示作業をすることなく、CADベースの操作のみで設定が完了する(図4)。
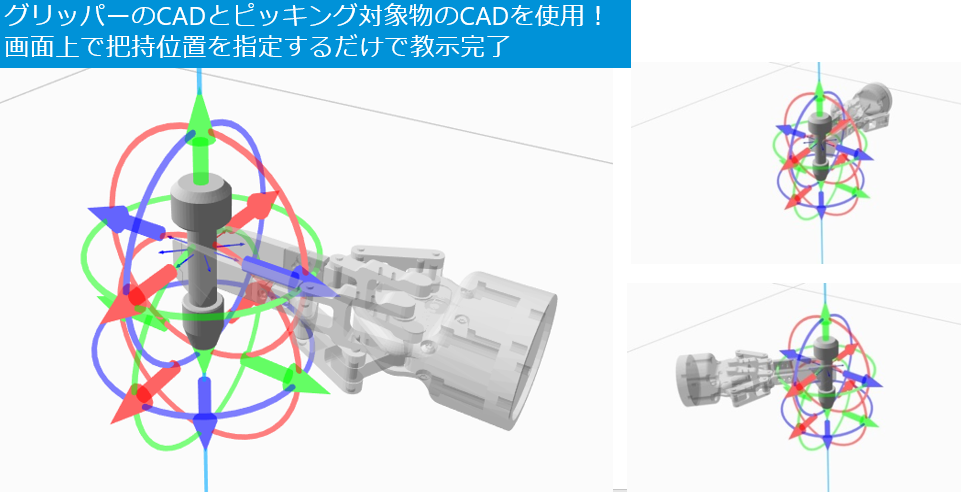
図4
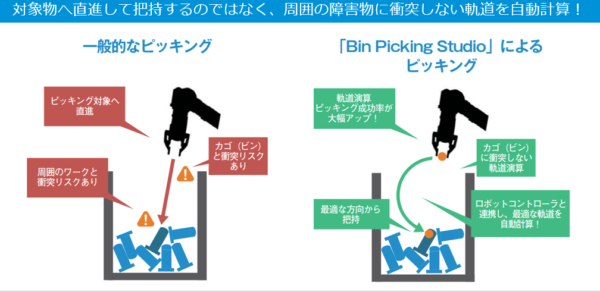
2)ロボット軌道演算で衝突回避
対象物をピッキングするためにロボットが動く軌道をVision Controller内で計算することにより、周囲の環境にぶつからないように的確なピッキングを実現することができる。また、部品箱のみでなく、ロボットの周囲の環境のCADを登録への衝突も考慮して軌道演算が行われる(図5、6)。
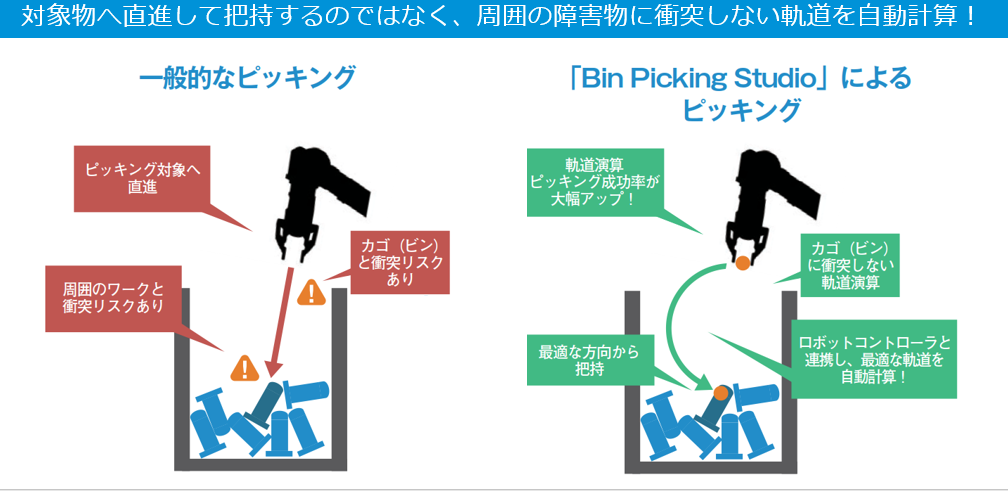
図5
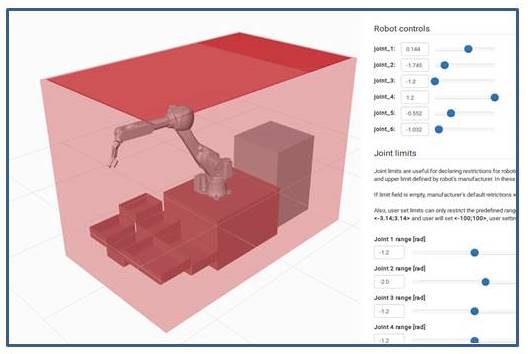
図6
3)キャリブレーションが簡単
一般的に、ロボットにカメラを取り付ける場合、カメラ座標系とロボット座標系を合わせ込むためのカメラキャリブレーション作業が必ず必要となる。
その際、カメラキャリブレーションは専用のツールをロボットの手先に持たせるなど煩雑なセットアップことが多い。Bin Picking Studioではキャリブレーション手順の簡単化が追求されており、グリッパーの手先に市販のピンポン玉をマグネットで取り付けて、4回以上撮影すれば完了できる仕様となっている(図7)。特別なツールは必要ない。

図7
Bin Picking Studioの使用手順
Bin Picking Studioでピッキング開始するための手順を図8に示す。
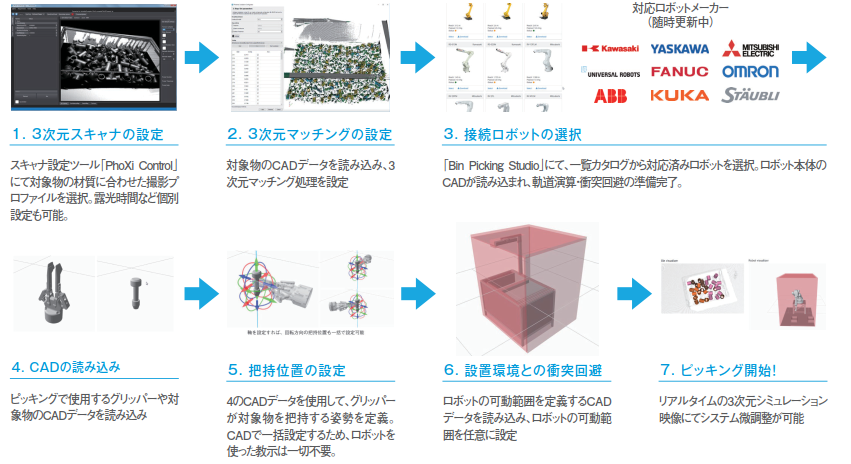
図8
レーザー縞投影 3Dスキャナ「PhoXi Scanner」
Photoneo社は創立当時からレーザー縞投影3Dスキャナ 「PhoXi Scanner」 を開発しており、同社の主力製品である。レーザー縞投影という独自の手法により、広い視野・深い被写界深度を実現し、ロボットピッキングに最適な3Dスキャナを提供している。
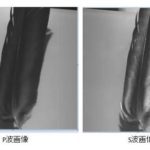
Bin Picking Studioは、この 「PhoXi Scanner」 の特長を最大限に引き出すパッケージ製品である。図9~11のとおり、レーザーの直進性や強力な光量を利用することで、レーザー縞投影は一般的な縞投影カメラに比べ、かなり広い視野と深い被写界深度を実現できる。
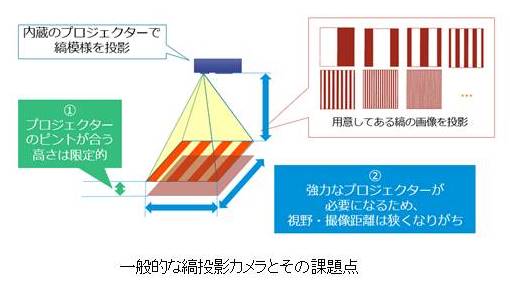
図9
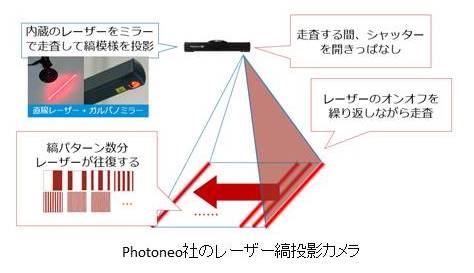
図10
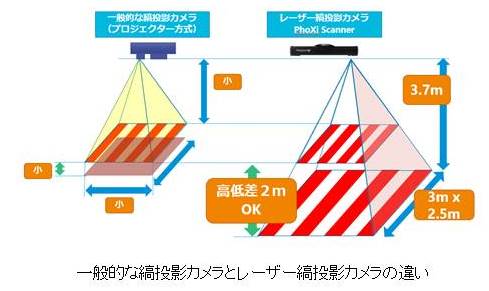
図11
また広い視野と高分解能を並立するために3.2Mpxという高解像度カメラを内蔵している。また、内部にGPUを搭載することで、3Dスキャナとしてはかなり高速な4fpsを実現している(図12)。

図12 視野に合わせて5モデルをラインナップ
超高速:20fpsでレーザー縞投影を実現する新製品 「MotionCam-3D」
Photoneo社は5年の歳月をかけてレーザー縞投影専用のカスタムCMOSセンサを自社開発した。本カスタムCMOSを利用することで、PhoXi Scannerの特長はそのままに、超高速の20fpsでレーザー縞投影を実現する新製品が2019年にリリース予定である。
本製品は、2018年11月にドイツで開催された画像機器の総合展示会 「VisionShow 2018」で披露され、優れた新製品に贈られる賞 「Vision Award」 のグランプリを獲得し注目を集めている(図13)

図13 「MotionCam-3D」 と専用CMOS素子
さいごに
本稿では、バラ積みピッキングの歴史を紐解きながら、Photoneo社のBin Picking Studioの位置づけを解説した。同社のBin Picking Studioは、欧米の自動車メーカ、Tier-1メーカで採用されている。
ZF社やBenteler社などでの採用事例ムービーを弊社のウェブサイトでも公開しているので是非ご確認いただきたい(https://linx.jp/product/photoneo/bpstudio/#movie)。
Bin Picking Studioは、物流用途向けにCAD登録を必要としない 「AnyPick」 機能を近日搭載予定である。また日本語化や、未対応のロボットメーカとの接続対応も進捗中である。
20fpsで3D撮像を行う新製品 「MotionCam-3D」 を含め、多岐にわたる新技術開発へ精力的に取り組むPhotoneo社に今後も注目されたい。
■問い合わせ先
株式会社リンクス
TEL.03-6417-3371
E-mail:info@linx.jp
https://linx.jp/
























コメントを残す